ヒューマノイドロボット全盛の
私たちが直立姿勢を保ち静かに立っているとき、身体の姿勢は微小に揺らいでいます。これは静止立位時姿勢動揺と呼ばれます。直立姿勢は機械力学的に不安定な倒立振子のようなもので、ヒトの脳神経は、筋肉が発生する力を介して、振子が倒れないように安定化しています。このよう考えますと、「姿勢動揺が大きい人は姿勢の安定性が低い」と思われるかもしれません。ところが、私たちはこの直感が常に正しいとは限らないことを明らかにしました。私たちは、阪大病院神経内科・国立刀根山病院と共同で、運動障害を伴う神経疾患であるパーキンソン病を患った患者さんの立位姿勢や歩行運動の研究をしています。患者さんの中には姿勢が不安定になり転倒しやすくなる症状を示す方がおられます。このような患者さんと健常者の姿勢動揺(足圧中心点CoP変動)を比べると、直感に反して、健常者の姿勢動揺の方が大きかったのです(図参照)。つまり、健常者の姿勢は柔軟で、患者さんの姿勢は剛直だと言えます。
私たちは、姿勢制御の数学モデル(コンピュータシミュレーションモデル)を構築し、計測実験の結果を機械力学とシステム科学の論理で説明することを試みました。その結果、ヒトの脳は身体の直立姿勢からの変位を直立姿勢に引き戻すような制御を常に持続的に行ってはおらず、制御を行わず重力に身を任せておく時間帯を間欠的に作り出していると仮定すると、健常者に見られるゆっくりとした比較的大きな姿勢動揺をうまく説明できることが分かりました。逆に、持続的な制御を仮定すると、患者さんに見られる小さな姿勢動揺になります。さらに、持続制御では、制御装置(脳)の特性が少しでも変わってしまうと姿勢を安定化できなくなってしまうのですが、間欠制御では、制御装置の特性がかなり大幅に変わっても直立姿勢をロバスト(頑強)に安定化できること、また、間欠制御の方がエネルギー効率が高いことも分かりました。最新の研究で、二足歩行の脳・神経制御も立位姿勢と同じように説明できることが分かってきています。
しばしば「生体機能はロボットのような人工装置と比べて柔軟性が高い」と言われます。柔軟性は運動の揺らぎを生み出します。揺らぎの生成・消失メカニズムの解明は、健康科学の基盤を提供すると考えられます。スーパーコンピュータの中に構築したヒトの脳神経・筋・骨格系の詳細で大規模な数学モデルは、ヒトと同じような柔らかな運動(運動揺らぎ)を再現することができるでしょうか。パーキンソン病患者さんに対応すると考えられる制御器の特性の変化は、患者さんの運動計測で観測されたような運動揺らぎの変容を再現することはできるでしょうか。スーパーコンピュータ「京」を用いた私たちの挑戦は続きます。
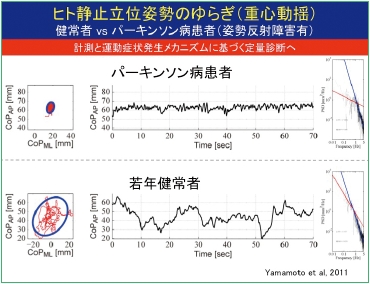
図: ヒト静止立位姿勢のゆらぎ(重心動揺)。上図:姿勢反射障害のあるパーキンソン病患者さんの姿勢動揺。下図:若年健常者の姿勢動揺。