私たちは、コンピュータ上にヒトのモデルをつくり、運動などの計測データからヒトの状態を推定することでヒトを理解しようとしています。膨大な要素からなる非常に精細なヒトのモデルは計算コストが非常に高いため、スーパーコンピュータのような高度並列計算が必要となってきます。
ヒトの状態を表わす情報の1つとして、筋張力などの体性感覚情報があります。私たちは光学式モーションキャプチャや床反力計、筋電計を用いた計測とヒトのモデルを用いることで、筋活動度の推定を実現しています。ヒトをワイヤで駆動される剛体リンク系とみなすことで、ロボティクスの分野で発展した運動・動力学計算基盤が適用できます。ヒトの筋骨格モデルは、実際の骨格標本をCTスキャンしたものをデータ処理し(AIST成人男性骨格形状データとして公開)、その上に筋・腱・靭帯の端点および経由点を解剖学に忠実に配置したものを製作しました。このモデルに基づき、運動学を解くことで関節角、動力学を解くことで床反力および関節トルク、そして筋張力二乗和最小などの最適化問題を解くことで全身の各筋の筋張力を推定します。
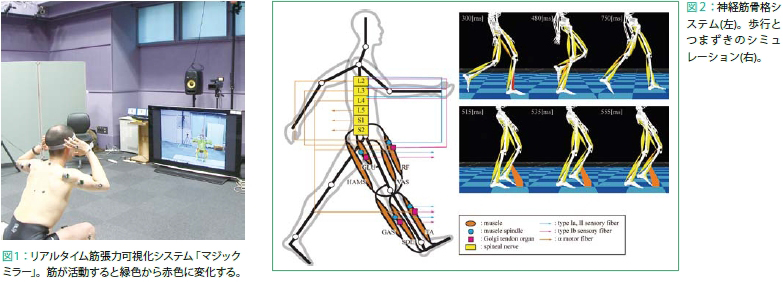
アプリケーションとして、「マジックミラー」を開発しています。これは筋張力のリアルタイム推定および可視化を実現したシステムで、1秒間に60フレームの高速推定を行っています。被験者はディスプレイの前で運動を行い、ディスプレイにはビデオカメラで取得された被験者の映像および筋張力を表す筋骨格モデルが重畳表示されます。これにより、被験者はあたかも自分の筋が服を透かして見えているように感じることから、マジックミラーと呼んでいます。このアプリケーションは運動障害などの定量的診断やリハビリテーションの効果の確認、スポーツトレーニングの支援などさまざまな応用が期待されます。従来これらの分野におけるアドバイスは運動の観測と経験則により行われてきましたが、筋張力の可視化により被験者の状態の定量的な把握が可能となり、またリアルタイムの可視化によりバイオフィードバックが可能となります。
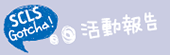
またヒトの運動制御システムの解明のために、筋骨格モデル上に解剖学的な神経回路モデルを構築した神経筋骨格システムを開発しています。これはヒトの運動の原始的な部分である体性反射をモデル化したもので、固有感覚が入力されると神経信号伝達による時間遅れ後の筋活動が出力されます。前述の計算基盤により、このシステムの入出力である筋の長さ、張力などの情報が計算でき、入出力間のネットワークを実験データから同定できます。このシステムは、ヒトに見られる膝蓋腱反射のような体性反射だけでなく、ヒトに見られるつまづきに対する反応などのシミュレーションを実現します。また感覚と運動の関係を表現することから、今後運動のパフォーマンスを上げる感覚の推定が可能になり、その感覚を実現するスポーツウェアやシューズの開発への展開が期待されます。
ヒトをモデリングし、ヒトを理解する
![]()
ZOOM IN 課題1 バクテリア細胞質の丸ごとモデリングと全原子分子動力学シミュレーション
ZOOM IN 課題3 ヒト静止立位と二足歩行の神経制御-運動揺らぎと神経疾患によるその変容-

 |
 |
 |
 |
 |
 |
|---|