In the current era when humanoid robots have reached the pinnacle of their development, many readers would not be much impressed by a mathematical model that simulates physical motion in human beings and is able to stand straight or walk on two feet. However, for us, who study brain and neural control (motor control) of human biological motion, there seems to be considerable difference between the appearance and kinetic properties of the motion of humanoids and humans.
When we maintain upright posture and stand still, the posture of the body moves infinitesimally. This is called postural sway during quiet standing. The upright posture is something like an inverted pendulum that is mechanically unstable, and the central nervous system of human beings stabilizes it by generating muscle forces so that the pendulum does not fall down. Given this perspective, one may think that “the larger the postural sway amplitude, the lower the stability is”. However, we have proved that this intuition may not be necessarily correct. We are studying the standing posture and walking movement of patients who suffer from Parkinson's disease, which is a neurological disease accompanied by movement disorder, in collaboration with the Department of Neurology, Osaka University Hospital and Toneyama National Hospital. The postures of some of these patients become unstable, and they tend to fall down easily. Comparison of the postural sway (foot pressure center CoP variation) of such patients and that of healthy young persons has revealed that the postural sway of healthy young persons is greater than the other, contrary to intuition (see figure). In other words, the posture of a healthy young person is flexible, and that of the above patients is rigid.
We have built a mathematical model of postural control (computer simulation model), and attempted to explain the results of the experimentally observed behaviors by the logic of mechanical dynamics and systems science. As a result, it was found that the human brain does not always continuously perform control to pull back displacement from the upright posture and there are time zones in which a human being yields its position to gravity intermittently without controlling it, which allowed us to elegantly explain the relatively large postural sway seen in healthy young persons. In fact, assuming continuous control allows us to explain the small postural sway seen in the above patients. Further, in continuous control, even a small variation in control parameters of the brain (as a motion controller) may make the upright posture unstable, whereas we clarified that in intermittent control, the upright posture can be stabilized in a robust manner even when the control parameters vary greatly, and that intermittent control is much better in energy efficiency. The latest study revealed that brain/neural control of biped ambulation can be explained in the same way as that of standing posture.
It is often said that "flexibility of vital functions is higher in human beings than in artificial devices such as robots". Flexibility leads to kinetic fluctuation. We believe that a basis for health science will be obtained by clarifying mechanisms of generation and loss of this movement fluctuation. Can a detailed and large-scale mathematical model of the central nervous system, muscle and skeletal system of humans built in a supercomputer reproduce flexible motion similar to that of a human being (motion fluctuation)? Can the degeneration of motion fluctuation observed in patients be reproduced by the variations in the control function that are thought to affect Parkinson's disease patients? Our challenge using the K computer continues.
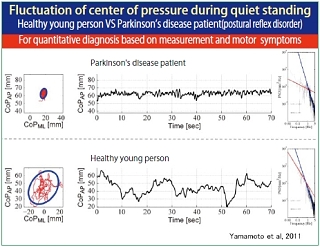
Fig. :Fluctuation of center of pressure during quiet standing. Upper figure: Postural sway in a Parkinson's disease patient with postural reflex disorder. Lower figure: Postural sway of a healthy young person.