We create a human model on a computer, and attempt to understand human beings by estimating their state based on measured data such as motion data. Since it costs a great deal to perform computation for a very detailed human model that consists of an enormous number of elements, high-level parallel computation by, for example, a super computer is needed.
One type of information that represents the state of human beings is somatosensory information such as muscle activity. We successfully estimate the muscle activity by utilizing measurement with optical motion capture, a floor reaction force plate, an electromyograph and a human model. Regarding a human being as a rigid body link system driven by wires enables us to apply a kinematics/dynamics computation, which is developed in the field of robotics. We create a human musculoskeletal model by processing the data obtained by CT-scanning an actual skeleton sample (published as AIST adult male skeleton shape data), and positioning endpoints and passing points of muscles, tendons and ligaments based on the anatomical knowledge. Joint angle, floor reaction force, joint torque, and activity of each muscle in the whole body, are estimated by solving kinematics, dynamics and optimization problems that minimize the quadratic sum of muscle tensions based on this model.
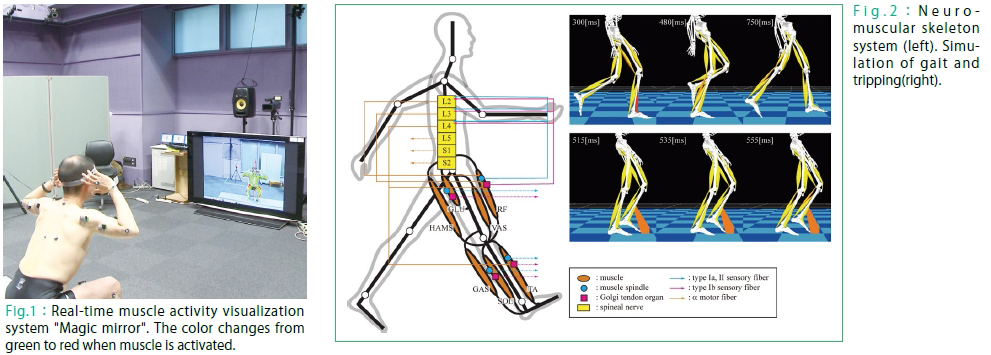
We develop an application known as "Magic mirror". This system realizes real-time estimation and visualization of muscle activity, and is capable of performing high-speed estimation at 60 frames per second. A subject moves his/her body in front of a display, and an image of the subject captured by a video camera and a musculoskeletal model that indicates muscle activity are superimposed on the display. Since this makes the subject feel that he/she is seeing his/her own muscles through his/her clothes, this application is called "Magic mirror". This "Magic mirror" has potential for various applications such as quantitative diagnoses of movement disorder, confirmation of rehabilitation effects, support of sports training, and so on. Conventionally, advice in these fields are given based on motion observation and empirical rules. Visualization of muscle activity allows quantitative understanding of the state of the subject, and further, the real-time visualization allows biofeedback.
We develop a neuromuscular skeleton system with an anatomical neural circuit model built on a musculoskeletal model to clarify the human motion control system. The somatosensory reflex, which is a primitive part of human motion, is modeled, and muscle activity after a time-delay by nerve signal transfer is output when proprioceptive sensation is input. Information such as muscle length and tension, which are the input and output of this system, is computed by the above kinematics/dynamics computation, and the network between input and output is identified from experimental data. This system realizes simulation not only of a somatic reflex such as the knee jerk seen in humans, but also of reactions to tripping seen in human. It is also expected that understanding the relationship between the sensation and the kinetics allows enhancement of kinetic performance, which leads to development of sportswear and shoes that realize such enhanced performance.
![]()
ZOOM IN Theme 1 Whole bacteria cytoplasm modeling and all-atom molecular dynamics simulations
ZOOM IN Theme 3 Neural control of human quiet standing and biped walking-Movement fluctuation and its degeneration caused by neurological disease-

 |
 |
 |
 |
 |
 |
|---|