
全身筋骨格-神経系統合シミュレーション

東京大学 大学院情報理工学系研究科
知能機械情報学専攻 中村・高野研究室
鮎澤 光
![]()
私たちはスーパーコンピュータを用いた数値計算を通じて、パーキンソン病を理解することを1つの大きな目標としております。パーキンソン病では、手足のふるえ、筋の固縮、立位時にバランス保持が難しくなるなどの障害がおこります。こうした原因として、脳内でドーパミンと呼ばれる神経伝達物質が不足するためだといわれています。しかし、脳内でのドーパミン不足が、なぜ全身の運動機能に障害をおこすかというメカニズムについては、未だによく分かっていない状況です。この研究では、脳内でおこる現象から全身の運動までの流れを解明するために、脳・脊髄・全身筋骨格を全て統合した大規模シミュレーションを行って、運動機能障害をもたらす神経疾患のメカニズムを解明しようとしています。このような大規模なシミュレーションを行うために、スーパーコンピュータを必要としています。
全身統合シミュレーションでは、脳・脊髄神経系、細胞レベルからの筋収縮、全身筋骨格系の運動など、異種のシミュレーションを連動させます。そのため、さまざまな研究背景を持った複数の研究グループが協力して進めています。私たちの研究グループは、本来はヒューマノイドロボットの研究・開発を行っています。人のようなロボットをつくる研究は、人を知り、理解する研究でもあります。近年では、ロボットテクノロジーを応用した人の骨格・筋・神経のモデリングによって、人の運動計測から筋張力の推定や、神経反射ネットワークの同定も可能になりつつあります。私たちのグループでは、53個の骨リンク、1,206本に細分化された筋・腱を持った全身筋骨格モデルを開発しており、現在では、リアルタイムで運動中の筋張力を推定することが可能です(図1)。
私たちは前述の筋骨格モデルに対して、他研究グループと連携しながら、詳細な筋モデルと細胞レベルでの筋活動シミュレーション、脳・脊髄神経系シミュレーションとの接続を試みています。前述のモデルでは通常のコンピュータでの計算を前提としているため、筋は単純なワイヤ型モデルを利用しています。この研究では、筋繊維から構成される骨格筋モデルを利用し、全身の脊髄神経系のネットワークを構築して、これらの間を接続します。単純な筋モデルと脊髄神経系ネットワークを接続した上腕モデルのシミュレーションでは、上腕の筋で伸張反射と呼ばれる現象を再現できています(図2)。この現象は、筋が引き伸ばされると反射的に筋収縮が生ずるもので、筋が伸ばされた神経信号が脊髄を介することで、その筋を逆に収縮させる信号を送ります。こうした現象の再現は、筋骨格モデルと脊髄神経ネットワークを連結したシミュレーションならではの結果といえます。これらは、さらに脳モデルと接続され、脳の信号から全身筋骨格が駆動されるシミュレーションを実現する予定です。
 |
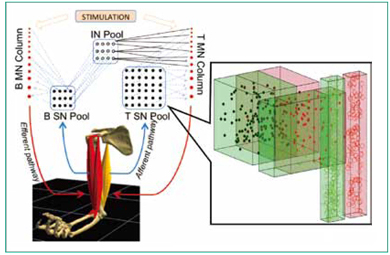 |
図1:筋張力推定の視覚表示例。緑色から赤色に変化するにつれて筋はより活動している。 |
図2:上腕の筋骨格モデルと脊髄神経モデルを接続したシミュレーション。 |